智果芯
智果芯
摘要:搞嵌入式有两个方向,一个是嵌入式软件开发(MCU方向),另一个是嵌入式软件开发(Linux方向)。其中MCU方向基本是裸机开发和RTOS开发。而Linux开发方向又分为驱动开发和应用开发。其中应用开发相比于驱动开发来说简单一些,因为搞驱动请你要和Linux内核打交道。而我们普通的单片机开发就是应用开发,和Linux开发没多大区别,单片机你去调别人写好的库,Linux应用你也是调别人的驱动程序。
很多人学习的路线是:单片机到RTOS,再到Linux,这个路线其实是非常好,循序渐进。因为你学了单片机,所以你对RTOS的学习会很容易理解,单片机+RTOS在市面上也可以找到一个很好的工作。因为你学了RTOS,你会发现Linux驱动开发其实和RT-Thread的驱动程序非常像,其实RT-Thread驱动大概率可能是仿Linux驱动而写的。所以如果你现在在学RT-Thread,那么你后面去搞Linux驱动也是非常容易上手。
当然做驱动去之前你还是要学习一下ubuntu操作系统、ARM裸机和linux系统移植,其目的就是为学习嵌入式linux驱动开发做准备。
话不多说先来一个hello驱动程序。
在Linux中,驱动分为三大类:
- 字符设备驱动
- 字符设备驱动是占用篇幅最大的一类驱动,因为字符设备最多,从最简单的点灯到 I2C、SPI、音频等都属于字符设备驱动的类型。
- 块设备驱动
- 块设备和网络设备驱动要比字符设备驱动复杂,就是因为其复杂所以半导体厂商一般都给我们编写好了,大多数情况下都是直接可以使用的。
- 所谓的块设备驱动就是存储器设备的驱动,比如 EMMC、NAND、SD 卡和 U 盘等存储设备,因为这些存储设备的特点是以存储块为基础,因此叫做块设备。
- 网络设备驱动
- 网络设备驱动很好理解,不管是有线的还是无线的,都属于网络设备驱动的范畴。一个设备可以属于多种设备驱动类型,比如 USB WIFI,其使用 USB 接口,所以属于字符设备,但是其又能上网,所以也属于网络设备驱动。
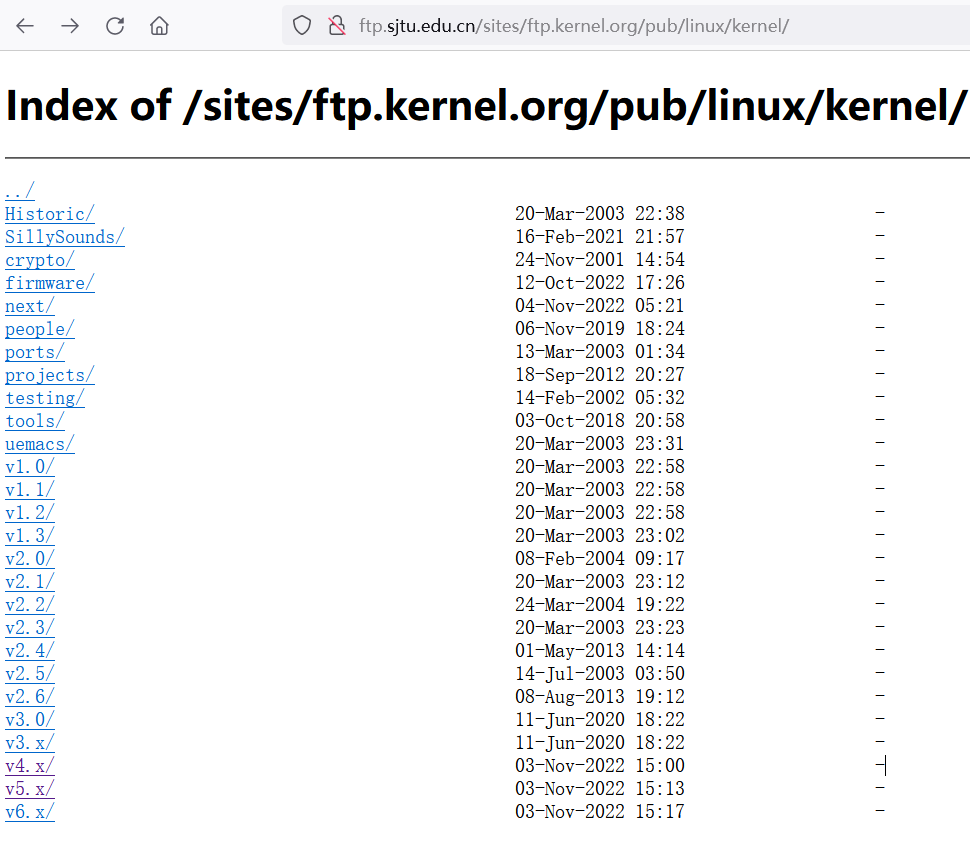
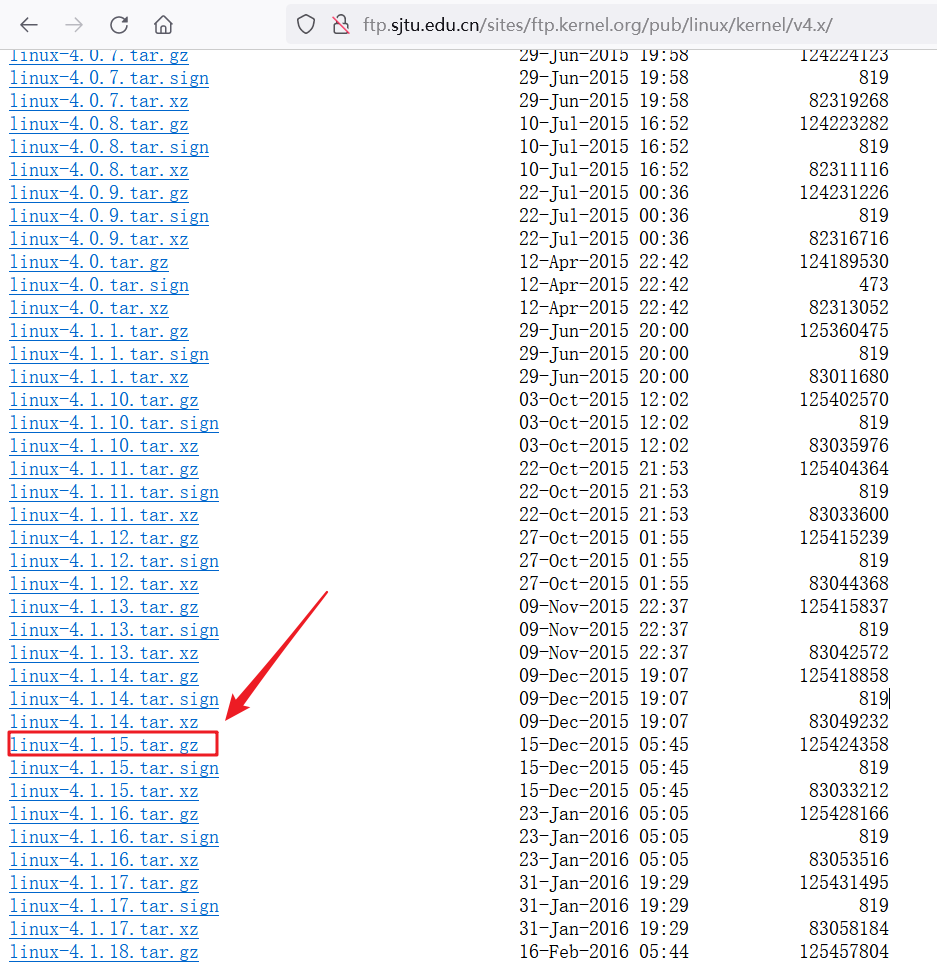
我使用的Linux内核版本为 4.1.15,其支持设备树Device tree。开发板是正点原子送的Linux-MINI板,你用其他家的板子也是一样的,没有任何影响。
一、字符设备驱动简介
字符设备是Linux驱动中最基本的一类设备驱动,字符设备就是一个一个字节,按照字节流进行读写操作的设备,读写数据是分先后顺序的。比如我们最常见的点灯、按键、IIC、SPI,LCD 等等都是字符设备,这些设备的驱动就叫做字符设备驱动。
那么在Linux下的应用程序是如何调用驱动程序的呢?Linux 应用程序对驱动程序的调用如图所示:
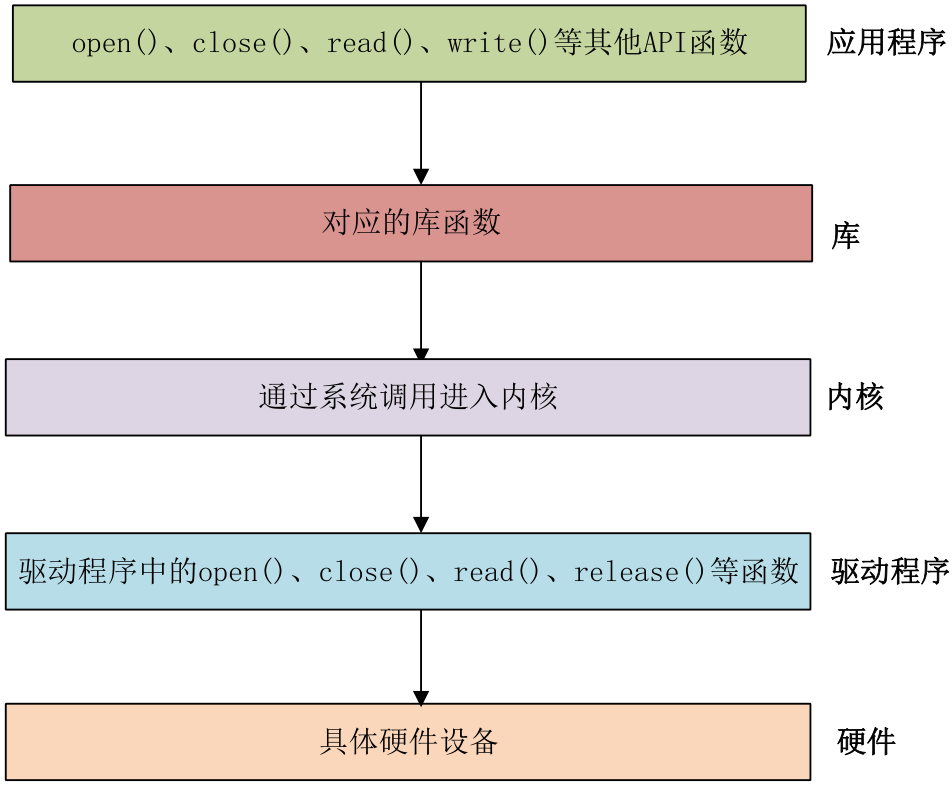
在Linux 中一切皆为文件,驱动加载成功以后会在/dev目录下生成一个相应的文件,应用程序通过对这个名为/dev/xxx(xxx是具体的驱动文件名字)的文件进行相应的操作即可实现对硬件的操作。
写驱动的人必须要懂linux内核,因为驱动程序就是根据内核的函数去写的,写应用的人不需要懂linux内核,只需要熟悉驱动函数就可以了。
比如现在有个叫做/dev/led的驱动文件,是led灯的驱动文件。应用程序使用open函数来打开文件/dev/led,使用完成以后使用close函数关闭/dev/led 这个文件。open和 close 就是打开和关闭led驱动的函数,如果要点亮或关闭led,那么就使用write 函数来操作,也就是向此驱动写入数据,这个数据就是要关闭还是要打开led的控制参数。如果要获取led 灯的状态,就用 read 函数从驱动中读取相应的状态。
应用程序运行在用户空间,而Linux 驱动属于内核的一部分,因此驱动运行于内核空间。当我们在用户空间想要实现对内核的操作,比如使用open函数打开/dev/led这个驱动,因为用户空间不能直接对内核进行操作,因此必须使用一个叫做“系统调用”的方法来实现从用户空间“陷入”到内核空间,这样才能实现对底层驱动的操作。
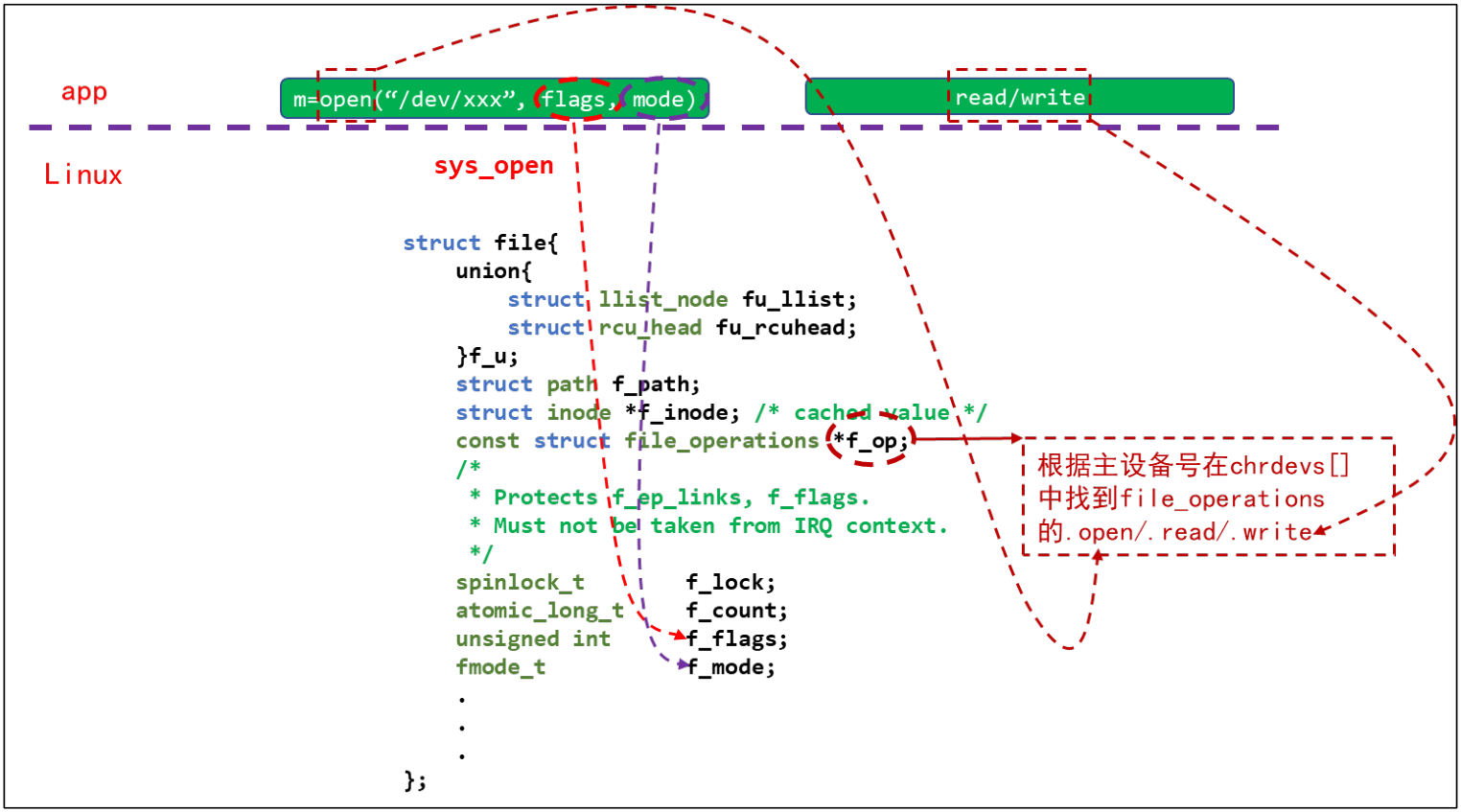
open、close、write 和read等这些函数是由C库提供的,在Linux系统中,系统调用作为C库的一部分。当我们调用 open 函数的时候流程如图所示:

其中关于C库以及如何通过系统调用“陷入”到内核空间这个我们不用去管,我们关注的是应用程序和具体的驱动,应用程序使用到的函数在具体驱动程序中都有与之对应的函数,比如应用程序中调用了open这个函数,那么在驱动程序中也得有一个名为open的函数。每一个系统调用,在驱动中都有与之对应的一个驱动函数。
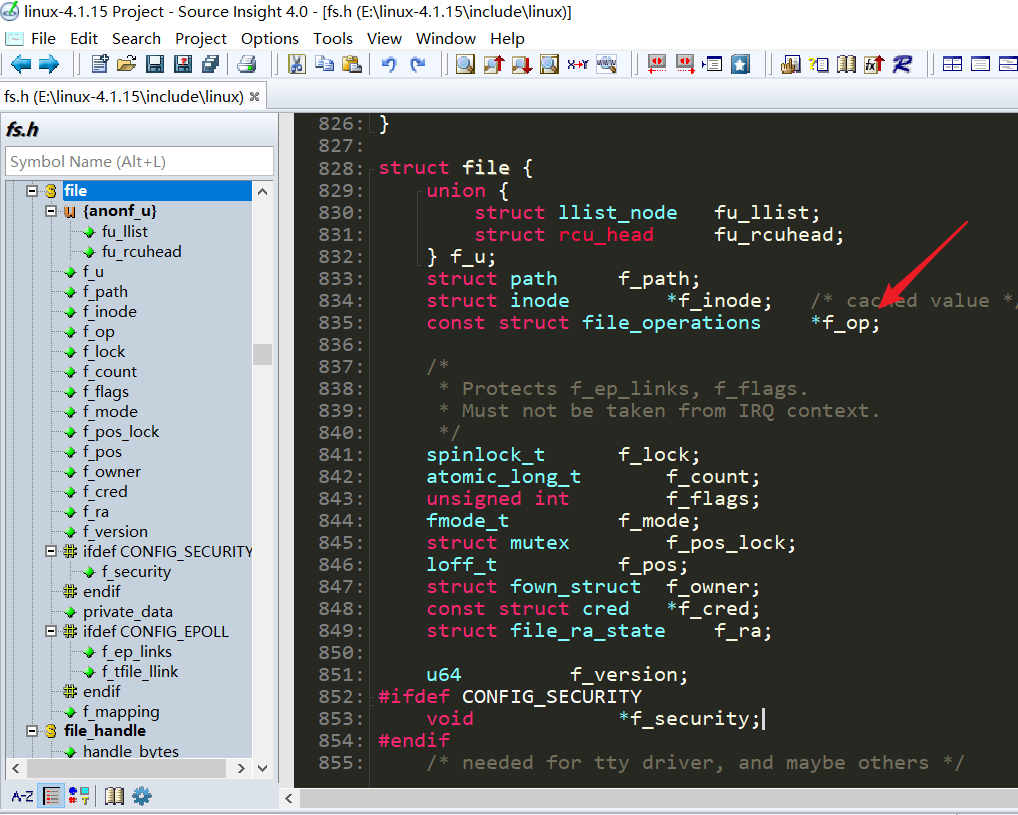
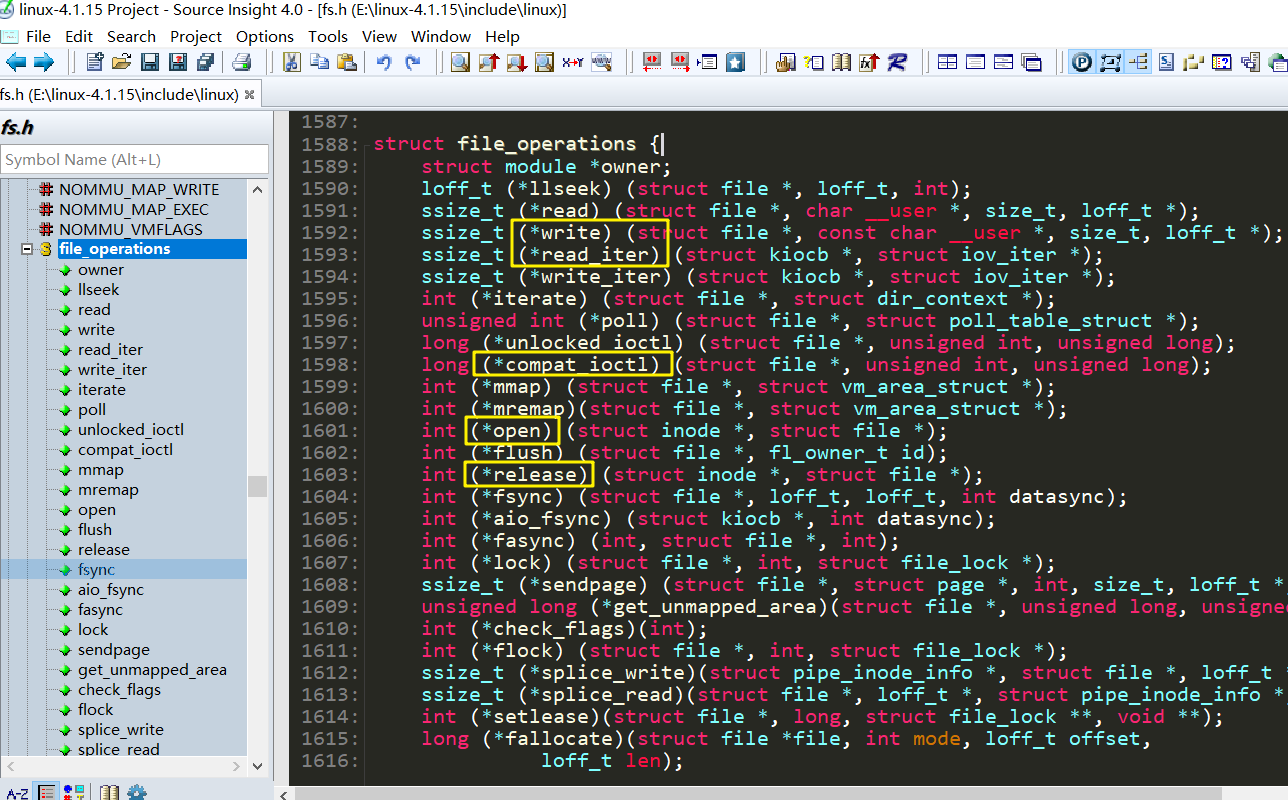
在Linux内核文件include/linux/fs.h中有个叫做file_operations的结构体,此结构体就是Linux内核驱动操作函数集合,我们可以将linux内核文件下载下来,然后用source insight打开看看。内容如下所示:
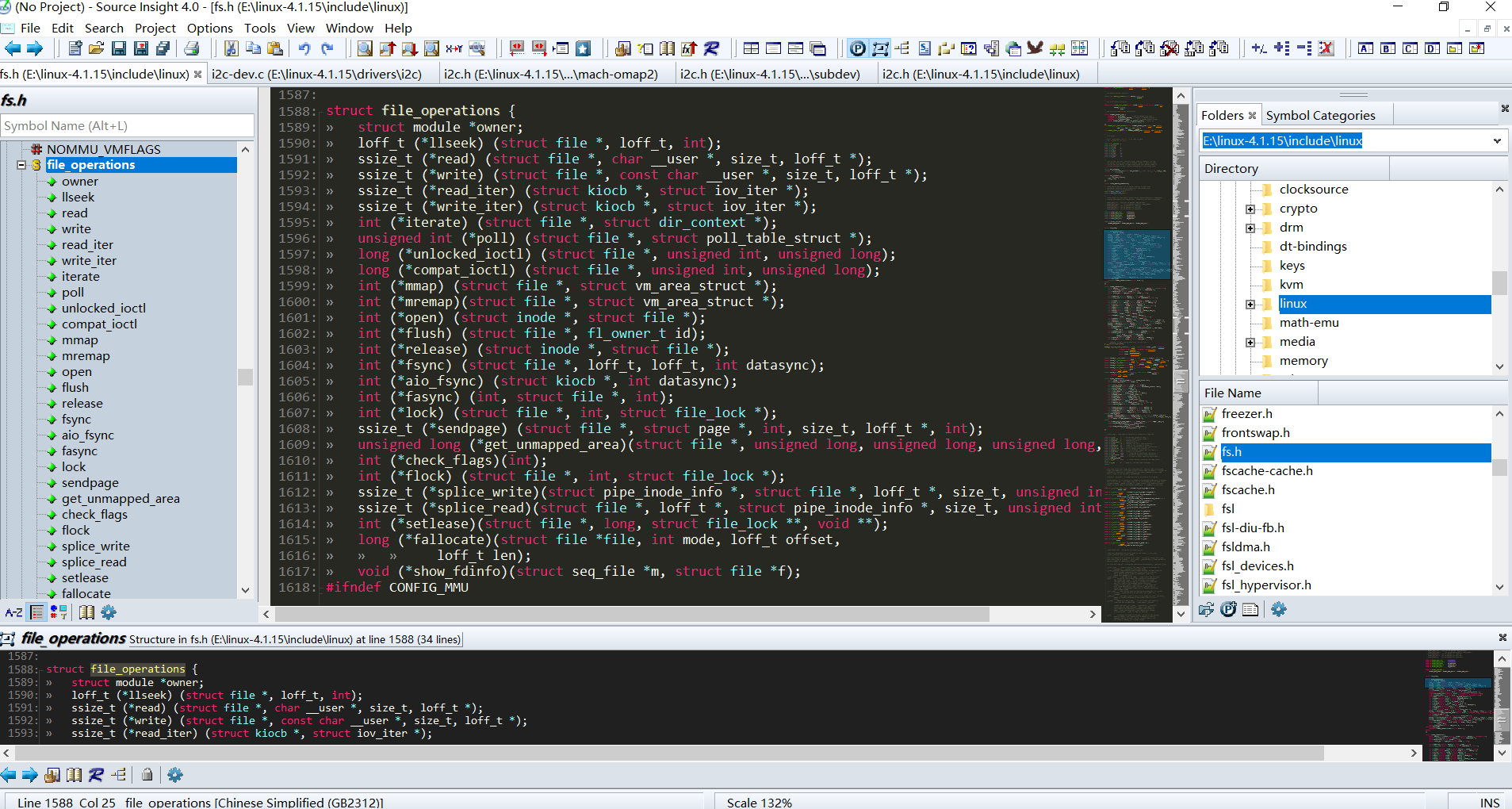
struct file_operations {
struct module *owner;
loff_t (*llseek) (struct file *, loff_t, int);
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
ssize_t (*read_iter) (struct kiocb *, struct iov_iter *);
ssize_t (*write_iter) (struct kiocb *, struct iov_iter *);
int (*iterate) (struct file *, struct dir_context *);
unsigned int (*poll) (struct file *, struct poll_table_struct *);
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);
long (*compat_ioctl) (struct file *, unsigned int, unsigned long);
int (*mmap) (struct file *, struct vm_area_struct *);
int (*mremap)(struct file *, struct vm_area_struct *);
int (*open) (struct inode *, struct file *);
int (*flush) (struct file *, fl_owner_t id);
int (*release) (struct inode *, struct file *);
int (*fsync) (struct file *, loff_t, loff_t, int datasync);
int (*aio_fsync) (struct kiocb *, int datasync);
int (*fasync) (int, struct file *, int);
int (*lock) (struct file *, int, struct file_lock *);
ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int);
unsigned long (*get_unmapped_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long);
int (*check_flags)(int);
int (*flock) (struct file *, int, struct file_lock *);
ssize_t (*splice_write)(struct pipe_inode_info *, struct file *, loff_t *, size_t, unsigned int);
ssize_t (*splice_read)(struct file *, loff_t *, struct pipe_inode_info *, size_t, unsigned int);
int (*setlease)(struct file *, long, struct file_lock **, void **);
long (*fallocate)(struct file *file, int mode, loff_t offset,
loff_t len);
void (*show_fdinfo)(struct seq_file *m, struct file *f);
#ifndef CONFIG_MMU
unsigned (*mmap_capabilities)(struct file *);
#endif
};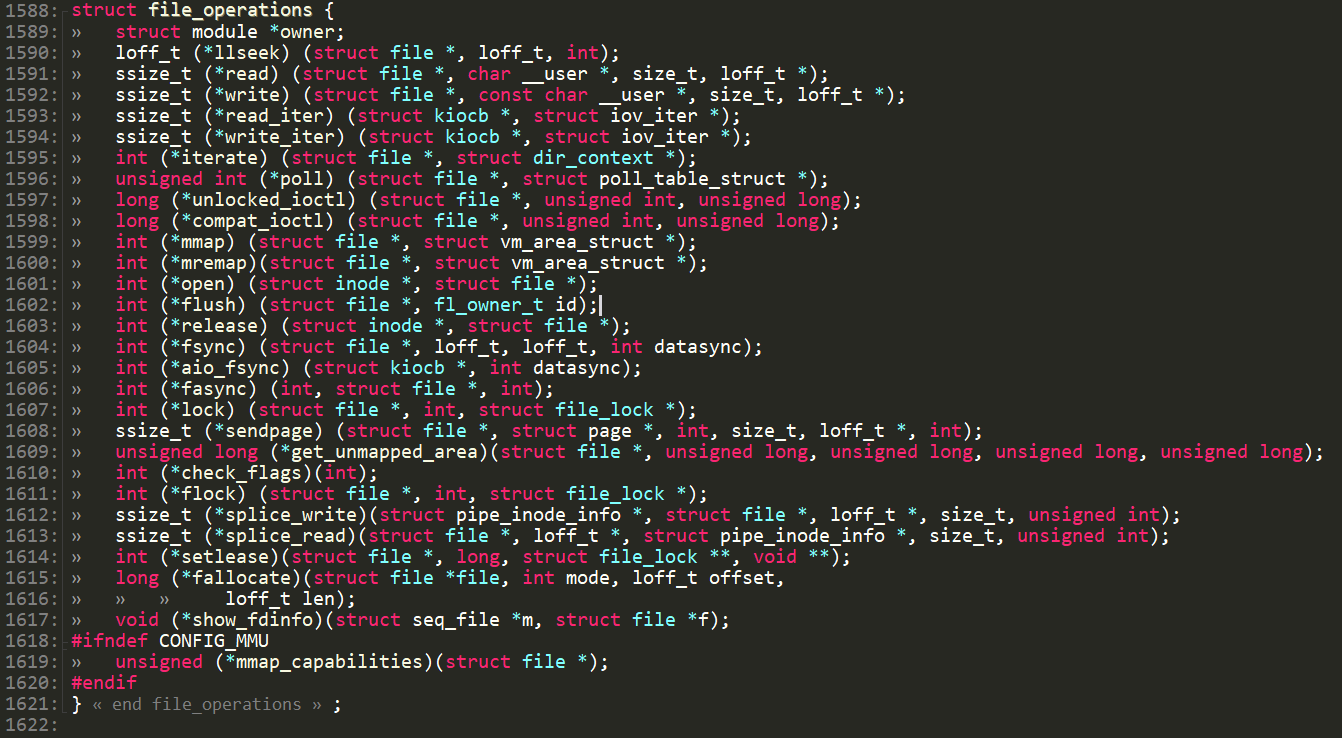
- 第 1589 行,owner 拥有该结构体的模块的指针,一般设置为
THIS_MODULE。 - 第 1590 行,llseek函数用于修改文件当前的读写位置。
- 第 1591 行,read函数用于读取设备文件。
- 第 1592 行,write函数用于向设备文件写入(发送)数据。
- 第 1596 行,poll是个轮询函数,用于查询设备是否可以进行非阻塞的读写。
- 第 1597 行,unlocked_ioctl函数提供对于设备的控制功能,与应用程序中的ioctl函数对应。
- 第 1598 行,compat_ioctl函数与unlocked_ioctl函数功能一样,区别在于在64位系统上,32位的应用程序调用将会使用此函数。在32位的系统上运行32位的应用程序调用的是unlocked_ioctl。
- 第 1599 行,mmap函数用于将将设备的内存映射到进程空间中(也就是用户空间),一般帧缓冲设备会使用此函数,比如LCD驱动的显存,将帧缓冲(LCD 显存)映射到用户空间中以后应用程序就可以直接操作显存了,这样就不用在用户空间和内核空间之间来回复制。
- 第 1601 行,open 函数用于打开设备文件。
- 第 1603 行,release 函数用于释放(关闭)设备文件,与应用程序中的 close 函数对应。
- 第 1604 行,fasync 函数用于刷新待处理的数据,用于将缓冲区中的数据刷新到磁盘中。
- 第 1605 行,aio_fsync函数与 fasync 函数的功能类似,只是aio_fsync是异步刷新待处理的数据。
二、字符设备驱动开发
学习裸机或者STM32的时候关于驱动的开发就是初始化相应的外设寄存器,在Linux驱动开发中肯定也是要初始化相应的外设寄存器,这个是毫无疑问的。只是在Linux驱动开发中我们需要按照其规定的框架来编写驱动,所以说学Linux驱动开发重点是学习其驱动框架。
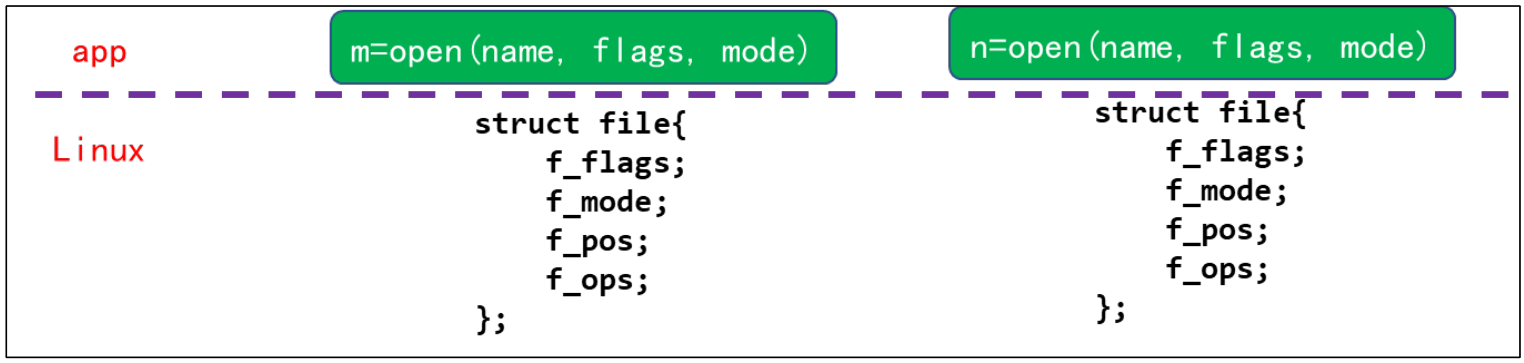
2.1 APP打开的文件在内核中如何表示
APP使用open函数打开文件时,可以得到一个整数,这个整数被称为文件句柄。对于APP的每一个文件句柄,在内核里面都有一个struct file与之对应。
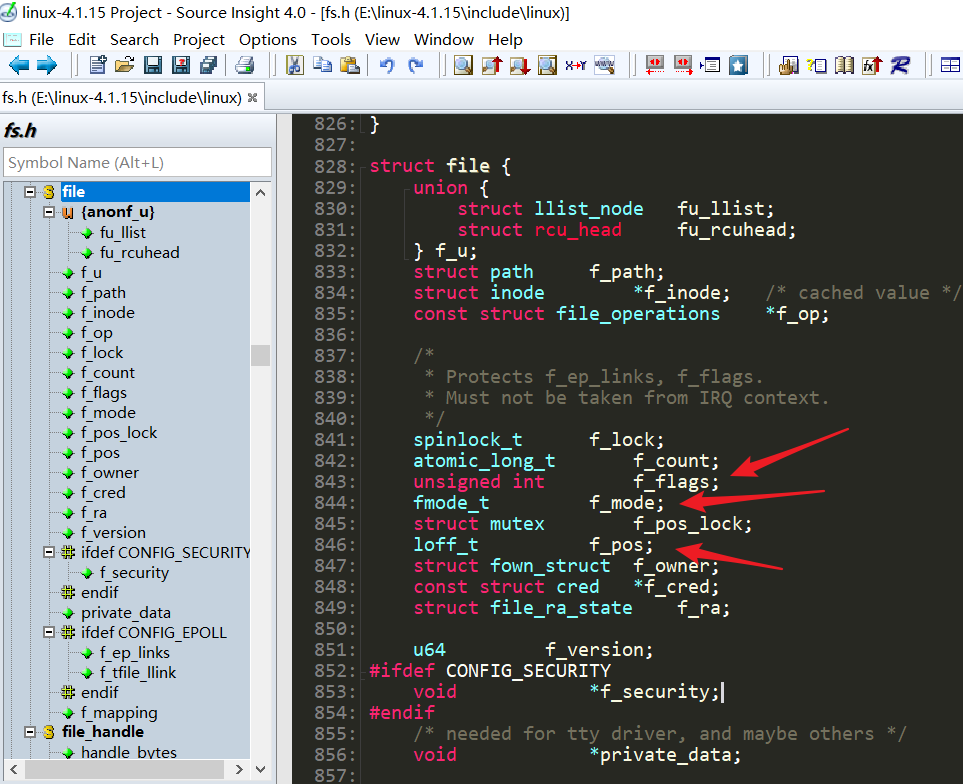
我们使用open打开文件时,传入的 flags、mode等参数会被记录在内核中对应的struct file结构体里(f_flags、f_mode):
int open(const char *pathname, int flags, mode_t mode);去读写文件时,文件的当前偏移地址也会保存在struct file结构体的f_pos成员里。
打开字符设备节点时,内核中也有对应的struct file注意这个结构体中的结构体:struct file_operations *f_op,这是由驱动程序提供的。
结构体struct file_operations的定义如下,上面也讲过了。
2.2 编写驱动程序的步骤
- 1、确定主设备号,也可以让内核分配。
- 2、定义自己的
file_operations结构体。 - 3、实现对应的
drv_open/drv_read/drv_write等函数,填入file_operations结构体。 - 4、把
file_operations结构体告诉内核:register_chrdev。 - 5、谁来注册驱动程序啊?得有一个入口函数:安装驱动程序时,就会去调用这个入口函数。
- 6、有入口函数就应该有出口函数:卸载驱动程序时,出口函数调用unregister_chrdev。
- 7、其他完善:提供设备信息,自动创建设备节点:class_create,device_create。
2.3 试验程序编写
应用程序调用open函数打开hello_drv这个设备,打开以后可以使用write 函数向hello_drv的写缓冲区writebuf中写入数据(不超过 100 个字节),也可以使用read函数读取读缓冲区readbuf中的数据操作,操作完成以后应用程序使用close函数关闭chrdevbase设备。
hello_drv.c
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
/* 1. 确定主设备号*/
static int major = 200;
static char kernel_buf[1024];
static struct class *hello_class;
#define MIN(a, b) (a < b ? a : b)
/* 3. 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t hello_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
err = copy_to_user(buf, kernel_buf, MIN(1024, size));
return MIN(1024, size);
}
static ssize_t hello_drv_write (struct file *file, const char __user *buf, size_t size, loff_t *offset)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
err = copy_from_user(kernel_buf, buf, MIN(1024, size));
return MIN(1024, size);
}
static int hello_drv_open (struct inode *node, struct file *file)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
return 0;
}
static int hello_drv_close (struct inode *node, struct file *file)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
return 0;
}
/* 2. 定义自己的file_operations结构体*/
static struct file_operations hello_drv = {
.owner = THIS_MODULE,
.open = hello_drv_open,
.read = hello_drv_read,
.write = hello_drv_write,
.release = hello_drv_close,
};
/* 4. 把file_operations结构体告诉内核:注册驱动程序 */
/* 5. 谁来注册驱动程序啊?得有一个入口函数:安装驱动程序时,就会去调用这个入口函数 */
static int __init hello_init(void)
{
int retvalue;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
retvalue = register_chrdev(major, "hello_drv", &hello_drv); /* /dev/hello */
if(retvalue < 0){
printk("chrdevbase driver register failed\r\n");
}
printk("chrdevbase init!\r\n");
return 0;
}
/* 6. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数*/
static void __exit hello_exit(void)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "hello_drv");
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(hello_init);
module_exit(hello_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("zhiguoxin");2.4 测试程序编写
驱动编写好以后是需要测试的,一般编写一个简单的测试APP,测试APP运行在用户空间。测试APP很简单通过输入相应的指令来对hello_drv设备执行读或者写操作。
hello_drv_test.c
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
/*
app测试
./hello_drv_test -w www.zhiguoxin.cn
./hello_drv_test -r
*/
int main(int argc, char **argv)
{
int fd;
char buf[1024];
int len;
/* 1. 判断参数 */
if (argc < 2)
{
printf("Usage: %s -w <string>\n", argv[0]);
printf(" %s -r\n", argv[0]);
return -1;
}
/* 2. 打开文件 */
fd = open("/dev/hello_drv", O_RDWR);
if (fd == -1)
{
printf("can not open file /dev/hello_drv\n");
return -1;
}
/* 3. 写文件或读文件 */
if ((0 == strcmp(argv[1], "-w")) && (argc == 3))
{
len = strlen(argv[2]) + 1;
len = len < 1024 ? len : 1024;
write(fd, argv[2], len);
}
else
{
len = read(fd, buf, 1024);
buf[1023] = '\0';
printf("APP read : %s\n", buf);
}
close(fd);
return 0;
}这里的代码很简单就不用再说了,这是linux应用开发的知识。
2.5 编写Makefile
KERNELDIR := /home/zhiguoxin/linux/IMX6ULL/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek
CURRENT_PATH := $(shell pwd)
obj-m := hello_drv.o
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
$(CROSS_COMPILE)arm-linux-gnueabihf-gcc -o hello_drv_test hello_drv_test.c
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean- 第1行,KERNELDIR表示开发板所使用的Linux内核源码目录,使用绝对路径,大家根据自己的实际情况填写。
- 第2行,CURRENT_PATH表示当前路径,直接通过运行
pwd命令来获取当前所处路径。 - 第3行,obj-m表示将
hello_drv.c这个文件编译为hello_drv.ko模块。 - 第8行,具体的编译命令,后面的modules表示编译模块,-C表示将当前的工作目录切换到指定目录中,也就是KERNERLDIR目录。M表示模块源码目录,
make modules命令中加入M=dir以后程序会自动到指定的 dir 目录中读取模块的源码并将其编译为.ko文件。 - 第9行,使用交叉编译工具链将
hello_drv_test.c编译成可以在arm板子上运行的hello_drv_test可执行文件。
Makefile 编写好以后输入make命令编译驱动模块,编译过程如图所示

有时候你可能遇到下面的错误
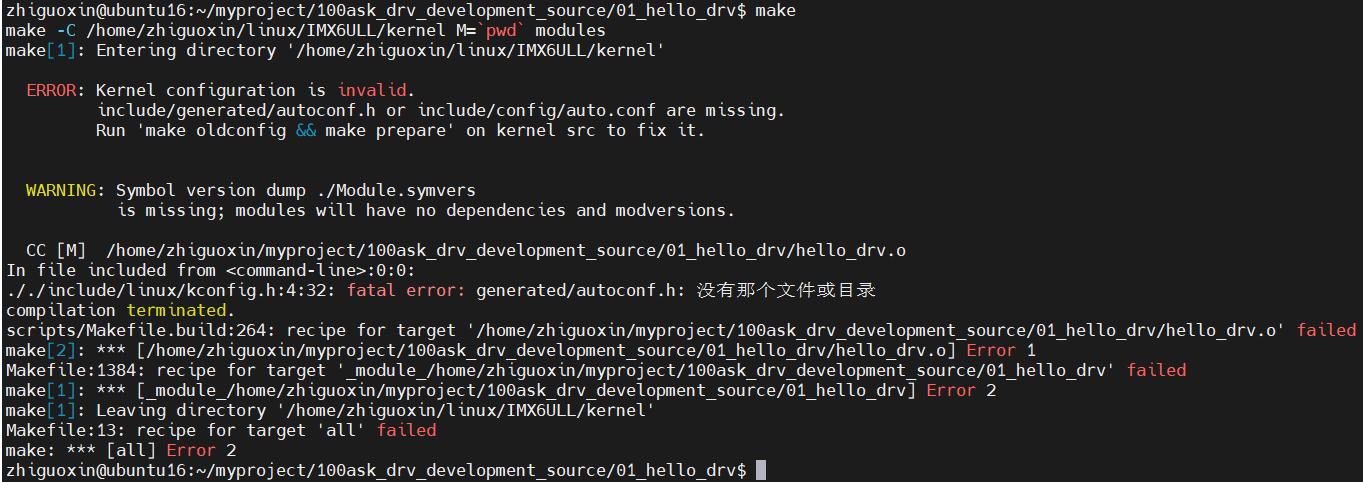
这个错误的原因是ubuntu中的linux源码没有编译导致的,使用下面的命令将源码编译一遍就好了。
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- imx_v7_defconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- all -j16编译成功以后就会生成一个叫做hello_drv.ko的文件,此文件就是hello_drv设备的驱动模块。至此,hello_drv设备的驱动就编译成功。

2.6 运行测试
2.6.1 上传程序到开发板执行
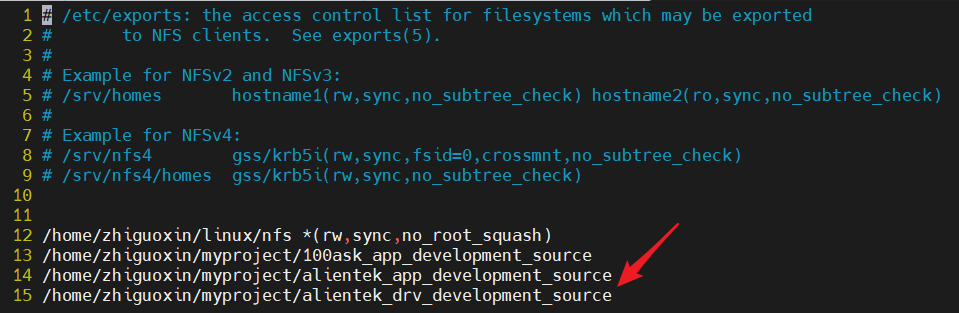
开发板启动后通过NFS挂载Ubuntu目录的方式,将相应的文件拷贝到开发板上。简单来说,就是通过NFS在开发板上通过网络直接访问ubuntu虚拟机上的文件,并且就相当于自己本地的文件一样。
因为我的代码都放在/home/zhiguoxin/myproject/alientek_drv_development_source这个目录下,所以我们将这个目录作为NFS共享文件夹。设置方法参考移植SQLite3、OpenCV到RV1126开发板上开发人脸识别项目第一章。
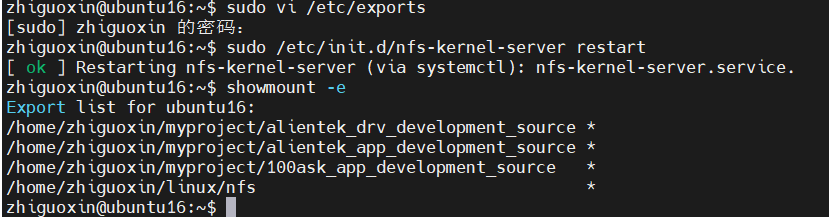
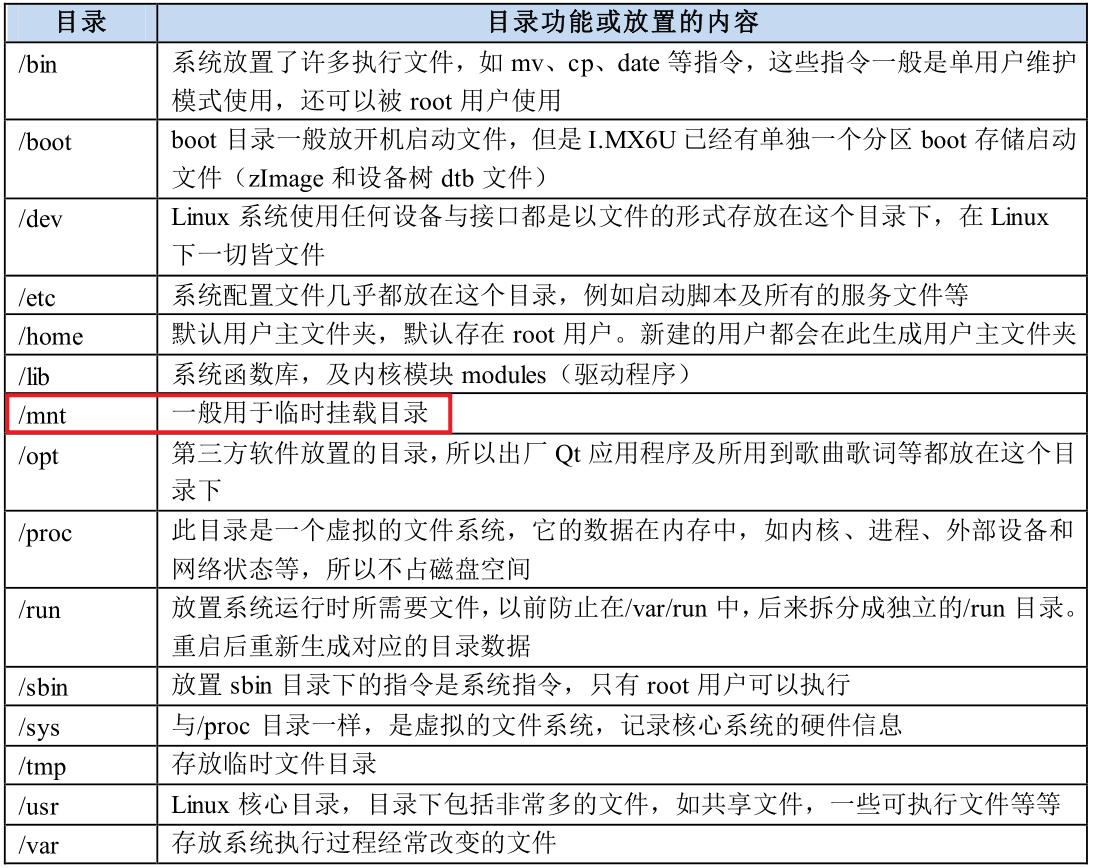
Ubuntu IP为192.168.10.100,一般都是挂载在开发板的mnt目录下,这个目录是专门用来给我们作为临时挂载的目录。
然后使用MobaXterm软件通过SSH访问开发板。
ubuntu ip:192.168.10.100
windows ip:192.168.10.200
开发板ip:192.168.10.50在开发板上执行以下命令就可以实现挂载了:
mount -t nfs -o nolock,vers=3 192.168.10.100:/home/zhiguoxin/myproject/alientek_drv_development_source /mnt就将开饭的mnt目录挂载在ubuntu的/home/zhiguoxin/myproject/alientek_drv_development_source目录下了。这样我们就可以在Ubuntu下修改文件,然后可以直接在开发板上执行可执行文件了。当然我这里的/home/zhiguoxin/myproject/和windows之间是一个共享目录,我也可以直接在windows上面修改文件,然后ubuntu和开发板直接进行文件同步了。

2.6.2 加载驱动模块
驱动模块hello_drv.ko和hello_drv_test可执行文件都已经准备好了,接下来就是运行测试。这里我是用挂载的方式将服务端的项目文件夹挂载到arm板的mnt目录,进入到/mnt/01_hello_drv目录输入如下命令加载hello_drv.ko驱动文件:
insmod hello_drv.ko
如果模块加载成功,不会有任何提示,如果失败会有提示,可能会出错的是你的模块版本和你的arm板内版本不一致。
输入lsmod命令即可查看当前系统中存在的模块
lsmod
当前系统只有hello_drv这一个模块。输入如下命令查看当前系统中有没有hello_drv这个设备:
cat /proc/devices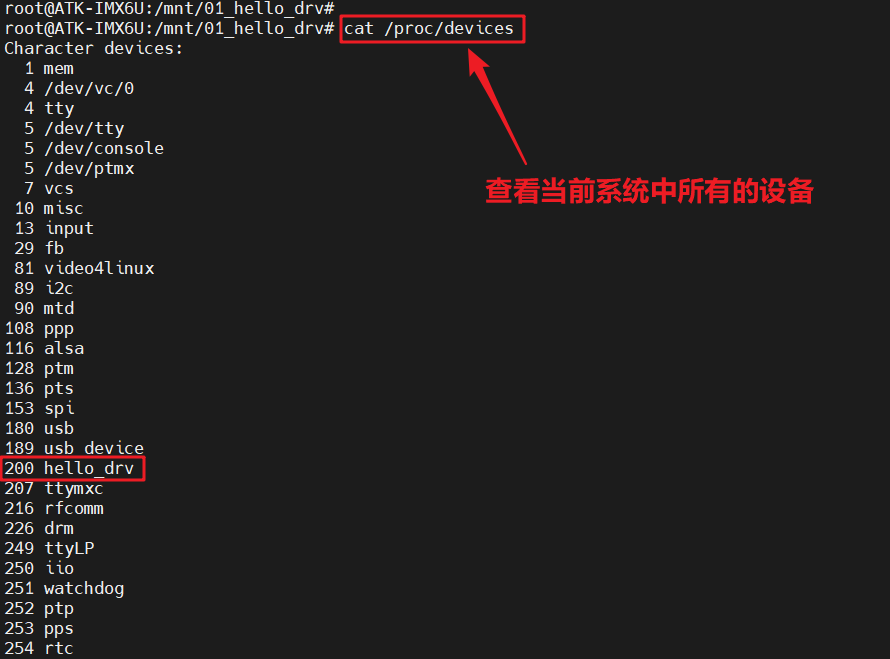
可以看出,当前系统存在hello_drv这个设备,主设备号为200,跟我们设置的主设备号一致。
2.7 创建设备节点文件
驱动加载成功需要在/dev目录下创建一个与之对应的设备节点文件,应用程序就是通过操作这个设备节点文件来完成对具体设备的操作。输入如下命令创建/dev/hello_drv这个设备节点文件:
mknod /dev/hello_drv c 200 0其中mknod是创建节点命令,/dev/hello_drv是要创建的节点文件,c表示这是个字符设备,200是设备的主设备号,0是设备的次设备号。创建完成以后就会存在/dev/hello_drv这个文件,可以使用ls /dev/chrdevbase -l命令查看
ls /dev/hello_drv -l
如果hello_drv_test想要读写hello_drv设备,直接对/dev/hello_drv进行读写操作即可。相当于/dev/hello_drv这个文件是hello_drv设备在用户空间中的实现。Linux下一切皆文件,包括设备也是文件,现在大家应该是有这个概念了吧?
2.8 hello_drv设备操作测试
一切准备就绪。使用hello_drv_test软件操作hello_drv这个设备,看看读写是否正常,首先进行写操作,将字符串输入www.zhiguoxin.cn写入到内核中
./hello_drv_test -w www.zhiguoxin.cn然后再从内核中将刚写入的字符串读出来
./hello_drv_test -r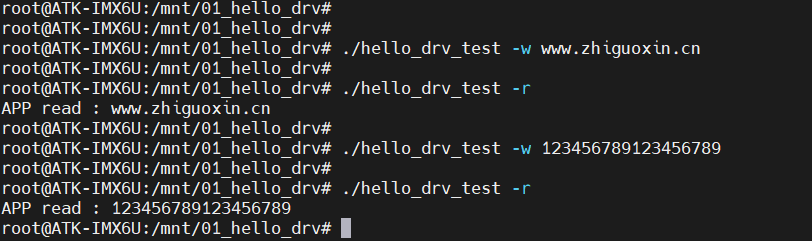
可以看到读写正常,说明我们编写的hello_drv驱动是没有问题的。
2.9 卸载驱动模块
如果不再使用某个设备的话可以将其驱动卸载掉,比如输入如下命令卸载掉 hello_drv这个设备:
rmmod hello_drv.ko卸载以后使用lsmod命令查看hello_drv这个模块还存不存在:
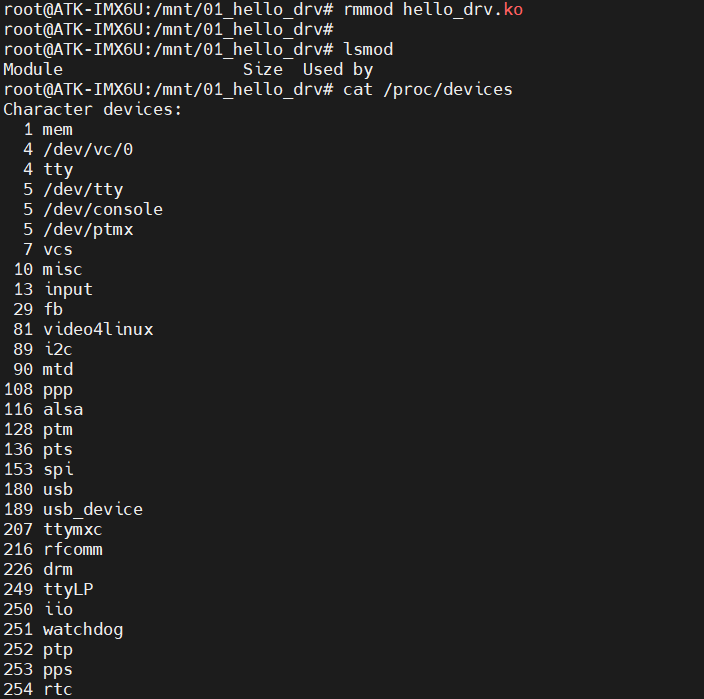
可以看出,此时系统已经没有任何模块了,hello_drv这个模块也不存在了,说明模块卸载成功。而且系统中也没有了hello_drv这个设备。
至此,hello_drv这个设备的整个驱动就验证完成了,驱动工作正常。以后的字符设备驱动实验基本都可以此为模板进行编写。
总结
上面就是Linux中的字符驱动,可能初学者看起来还有点难,这里我并没有讲解代码,因为没有什么好讲的,就是我前面在单片机开发中的常说的面向对象编程和指针函数的实际运行,所以做嵌入式还是要把C语言的基础打牢,尤其是结构体、指针和链表,如果这第三个你能很好的理解那么Linux驱动编程就非常容易,因为驱动开发就=软件架构+硬件操作。而软件架构就需要你要非常熟悉C语言,硬件操作就是你单片机的那几个寄存器操作。当然如果你学了RT-Thread那么学习Linux驱动也是非常容易的,因为RT-Thread是内核+驱动,而FreeRTOS只是一个内核而已。